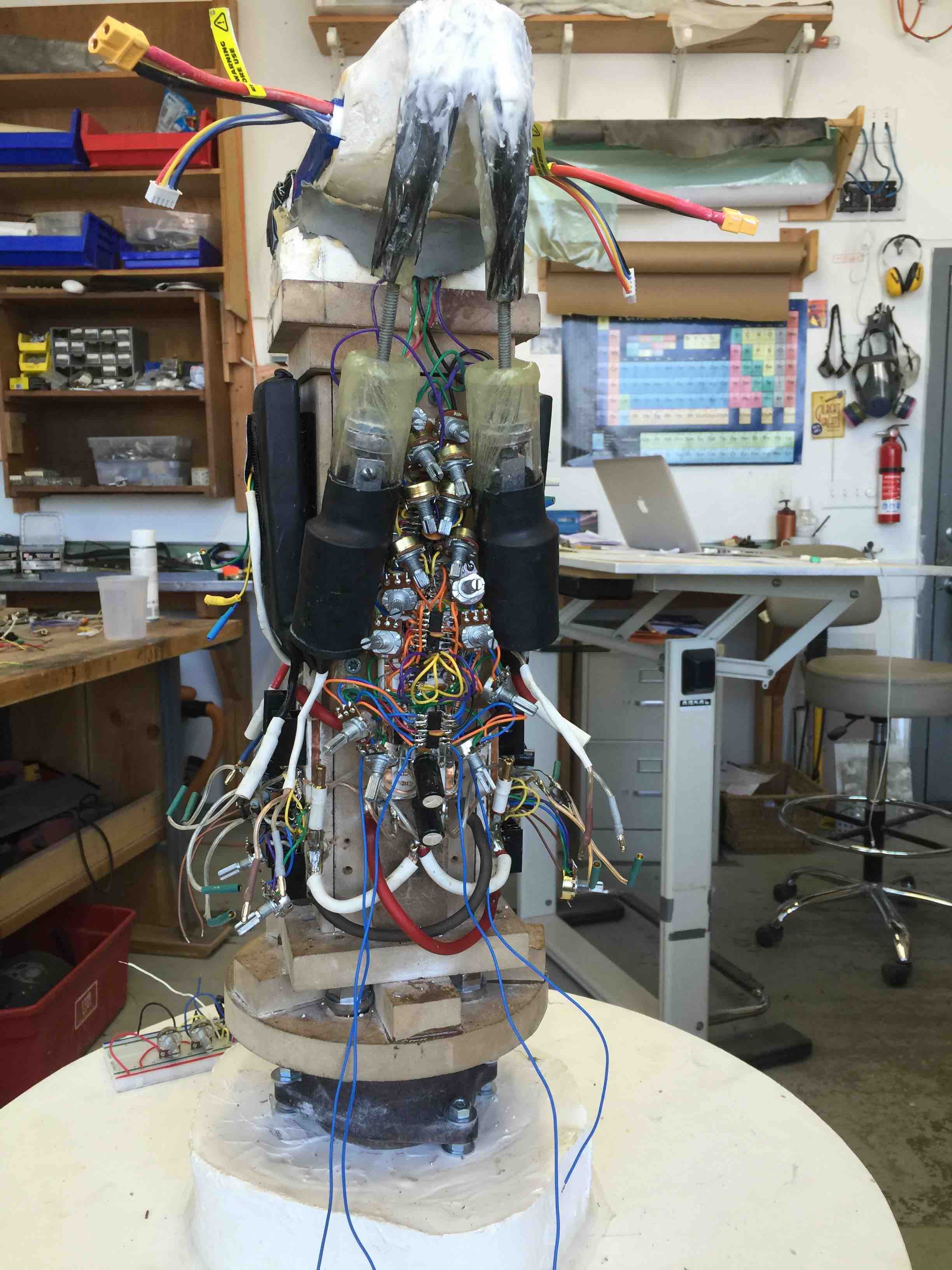
Analog Robot Arm
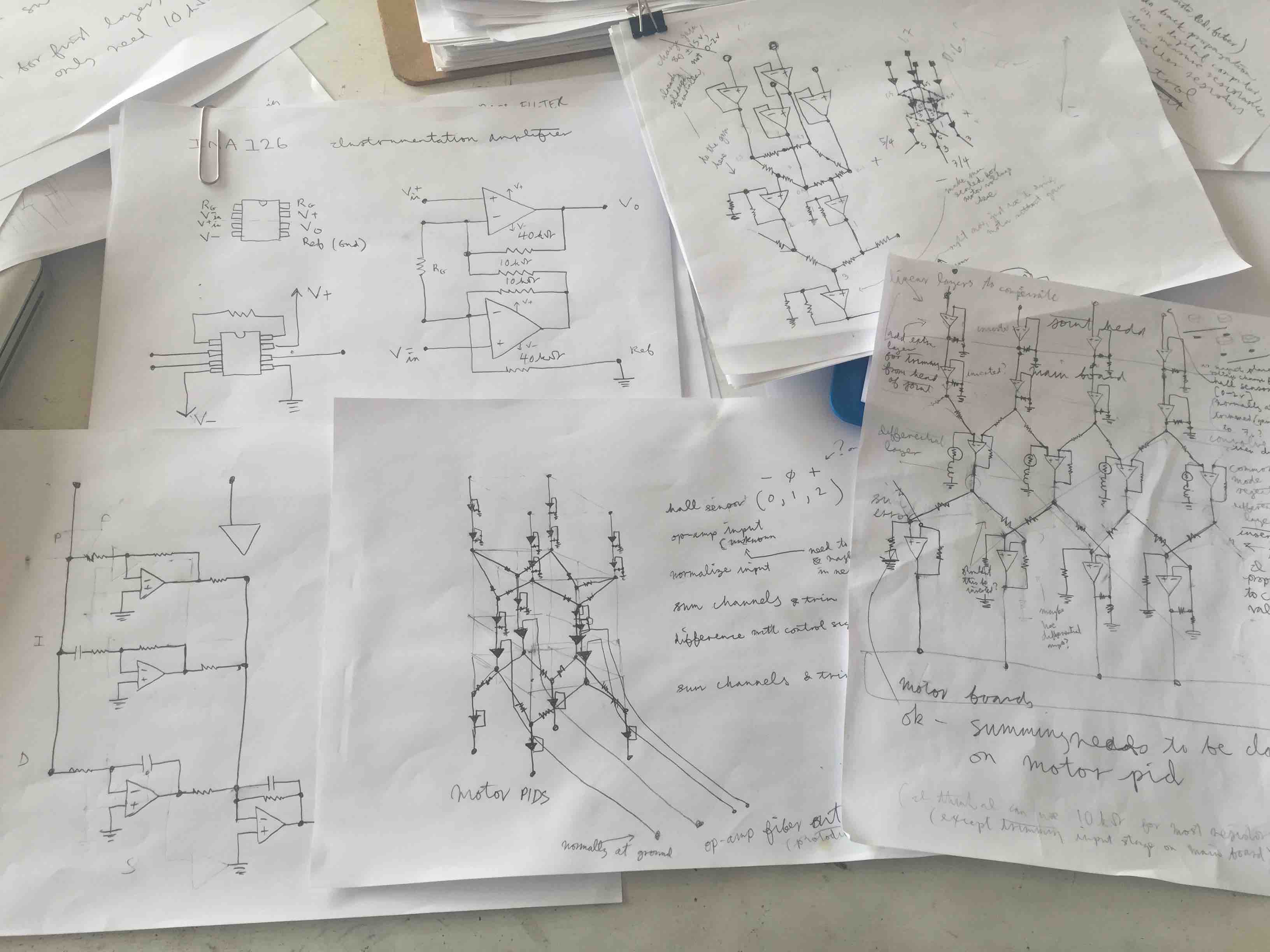
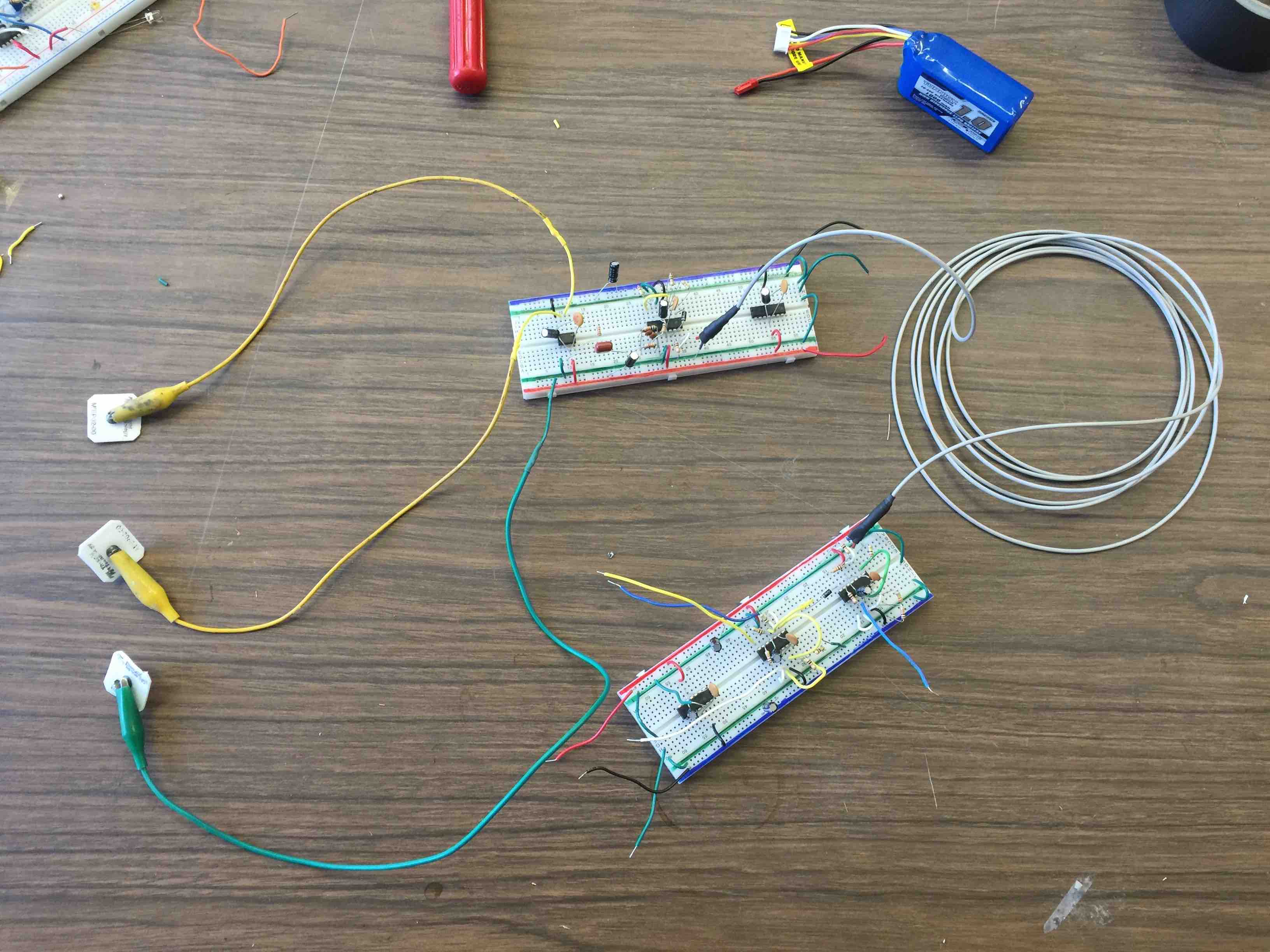
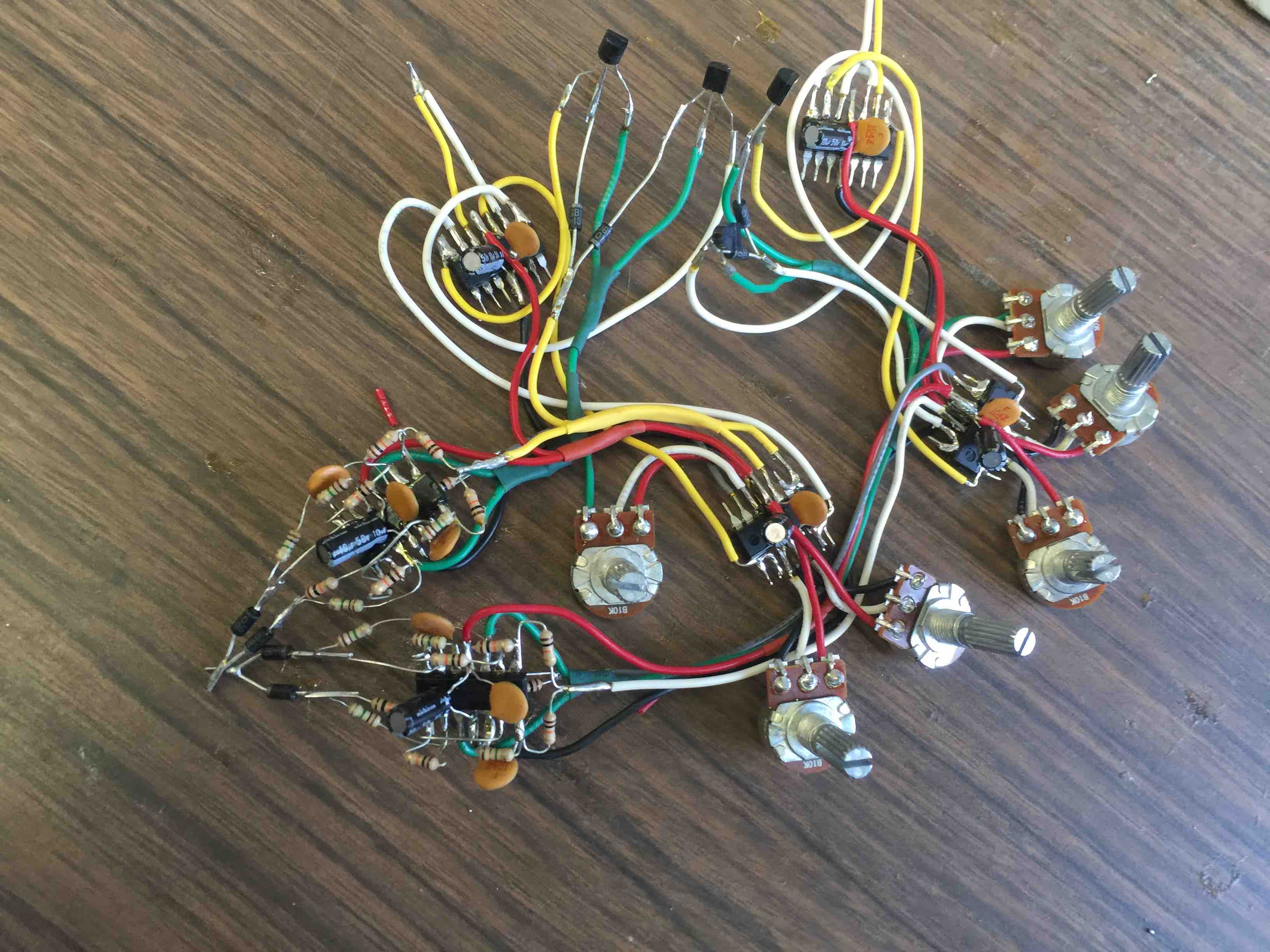
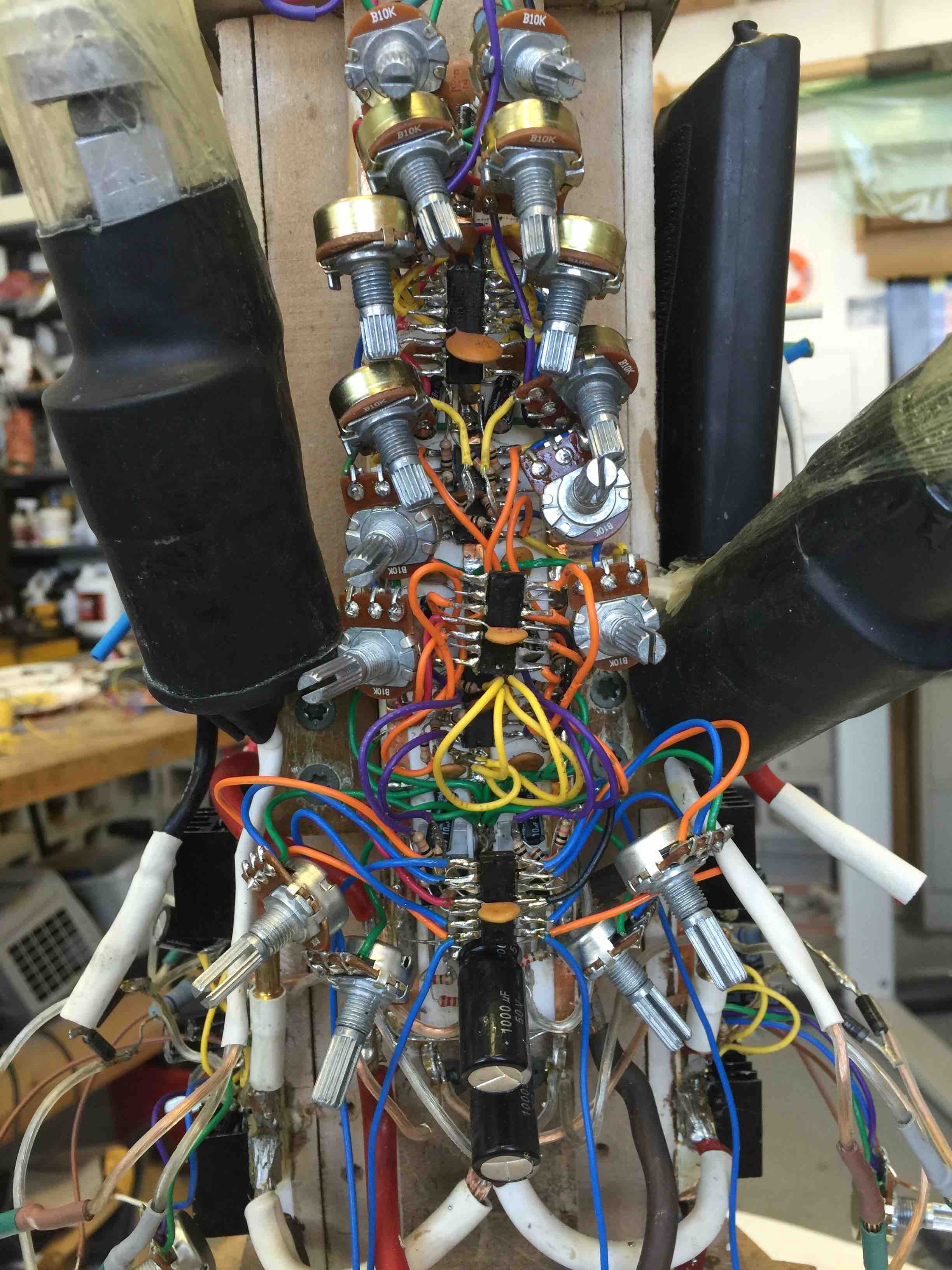
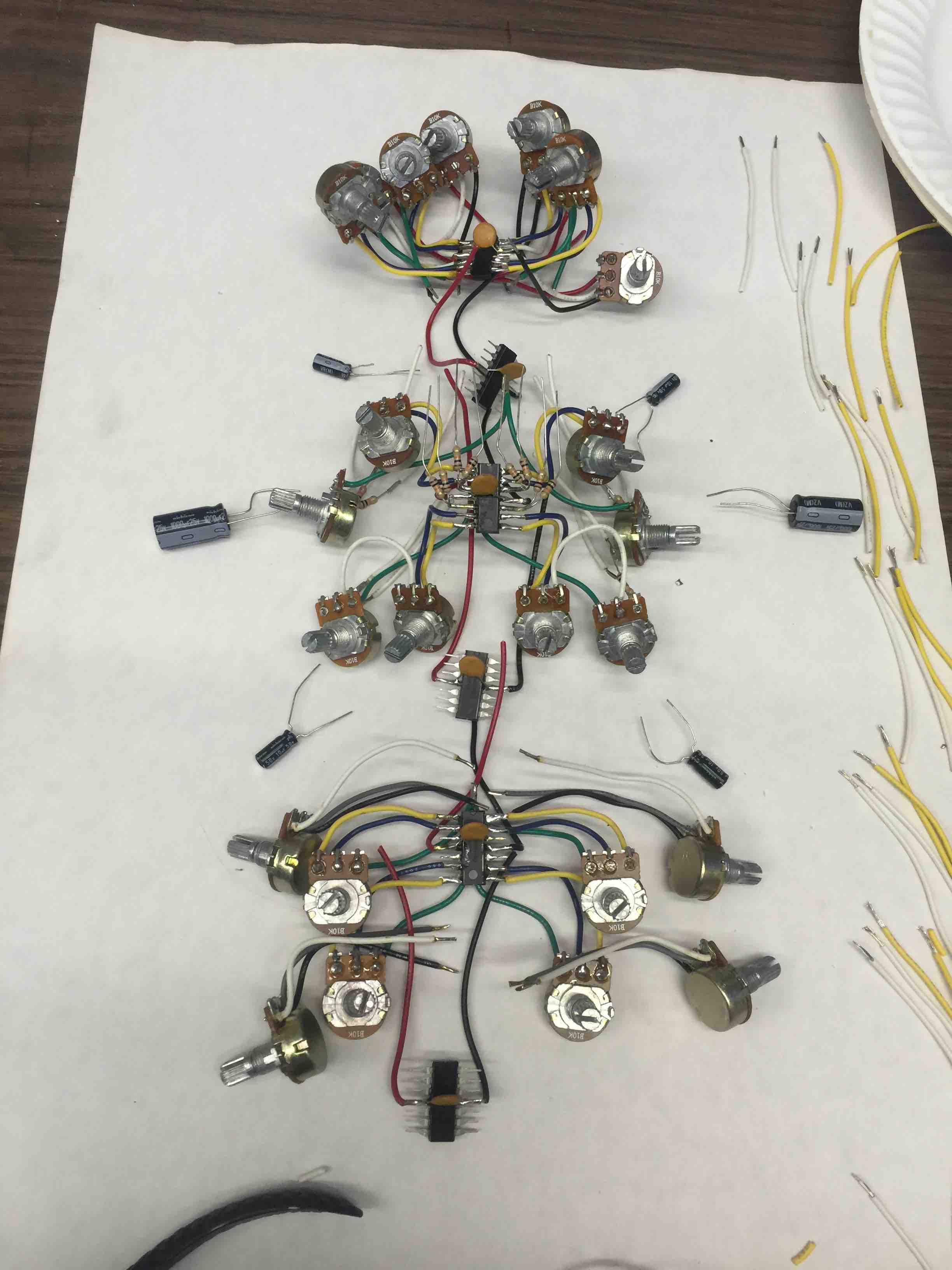
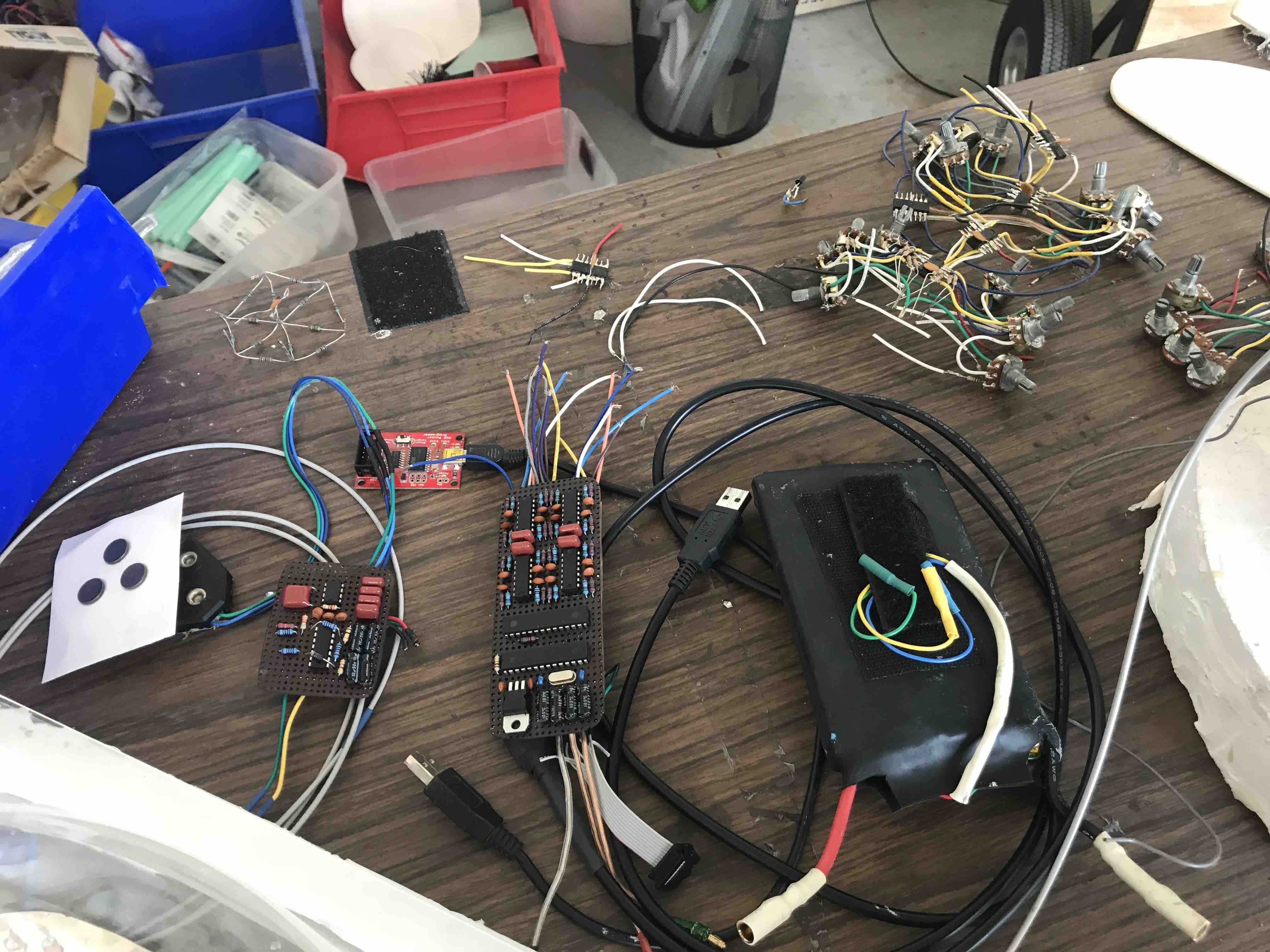
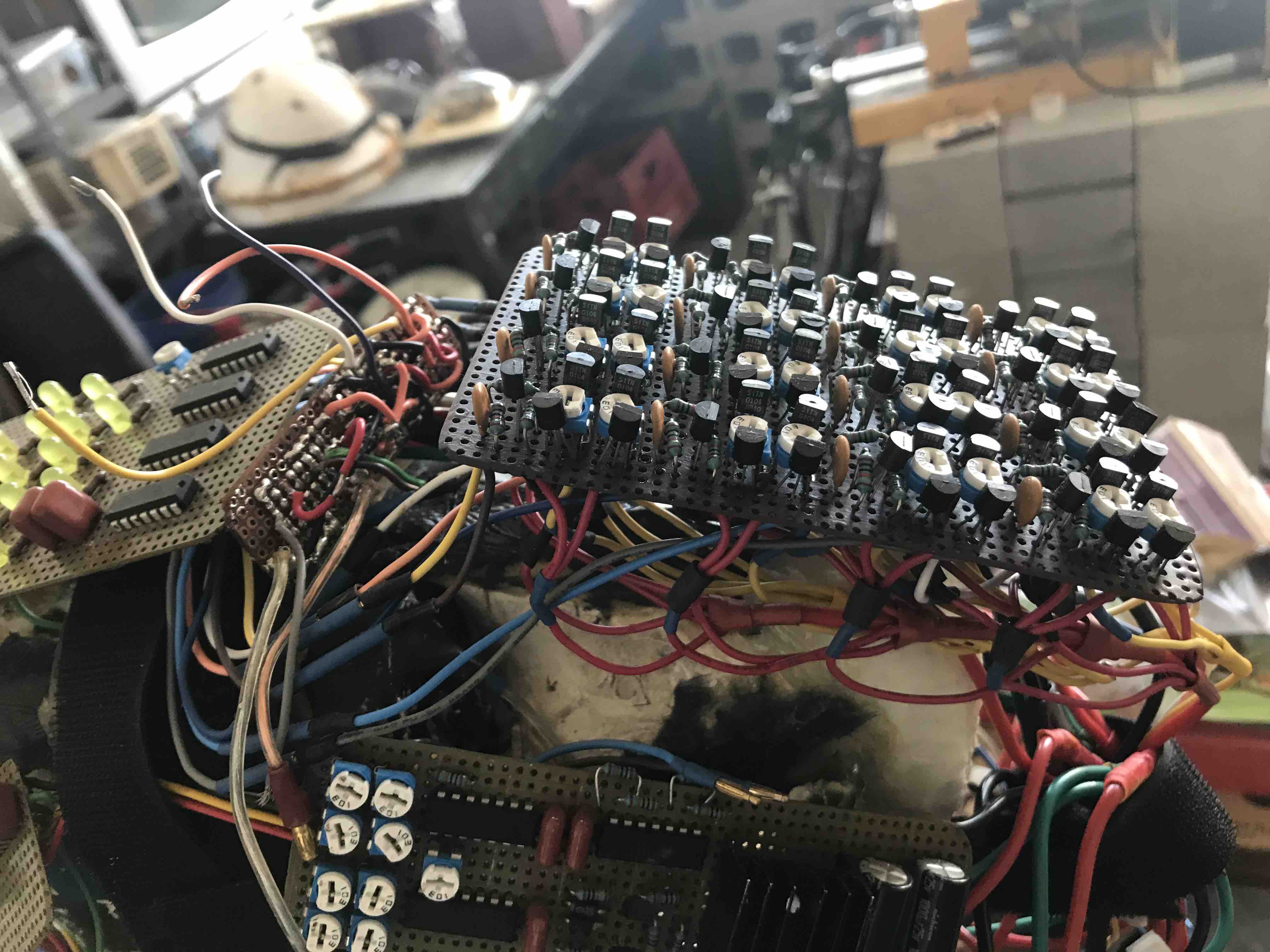
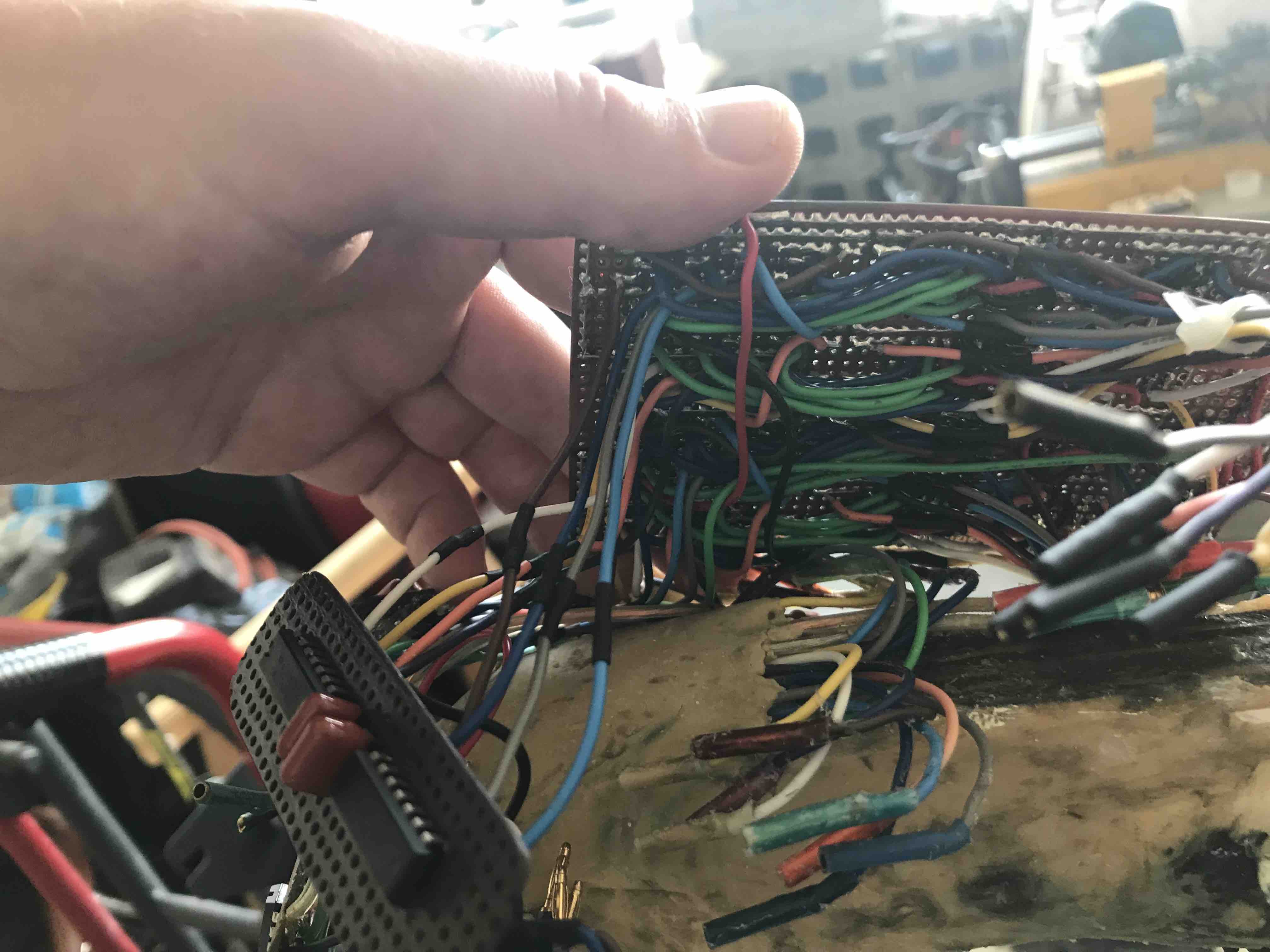
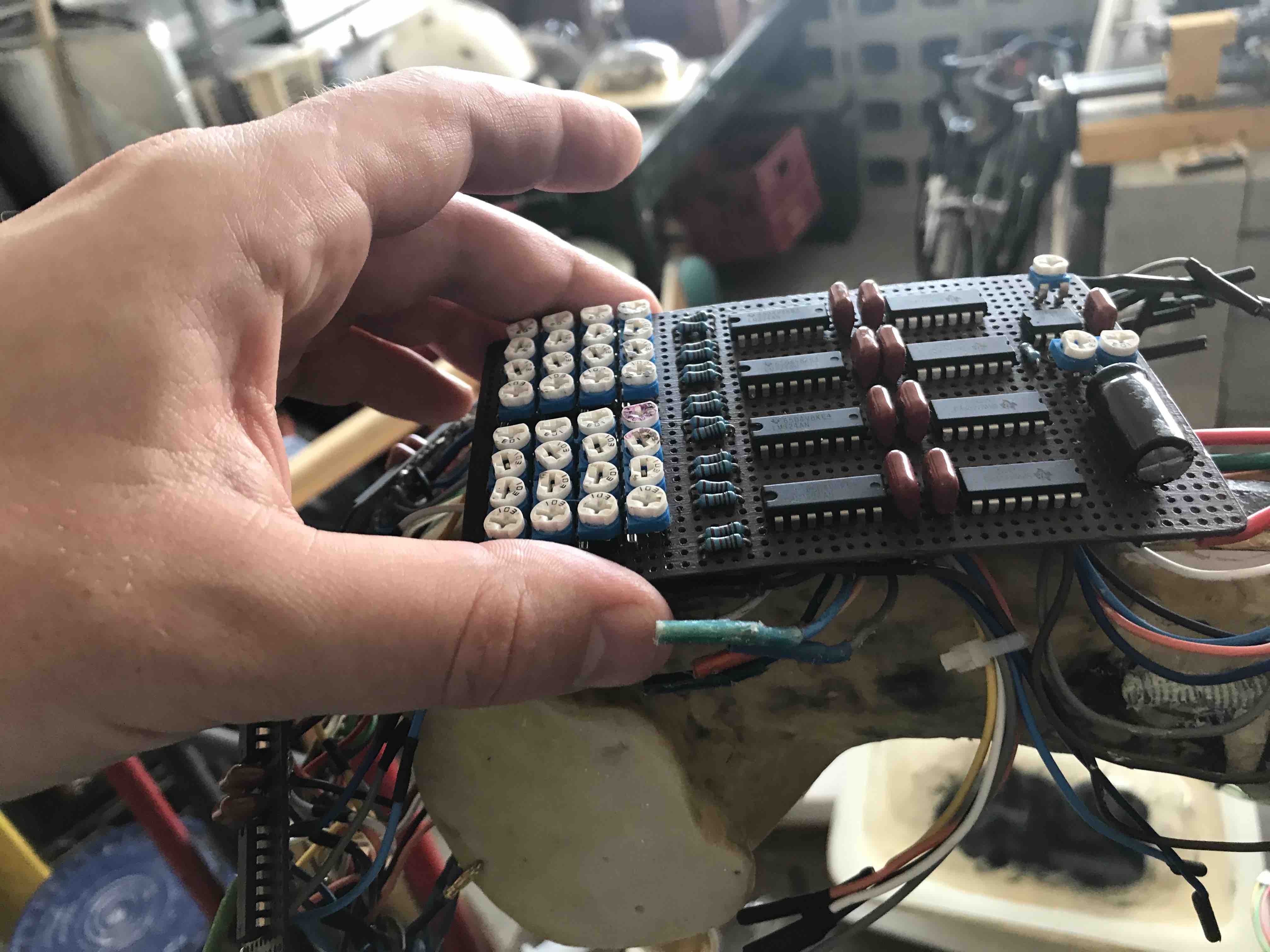
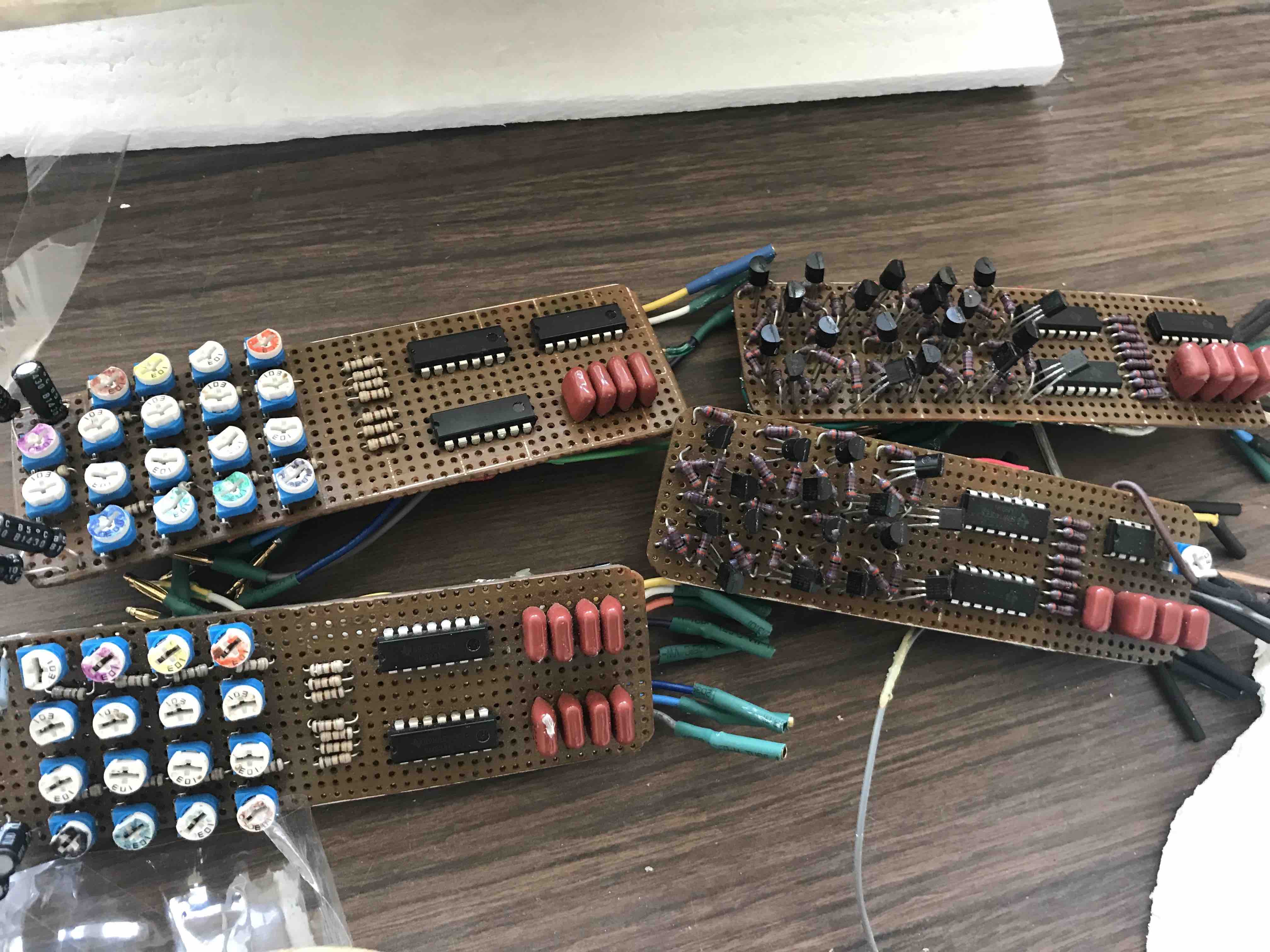
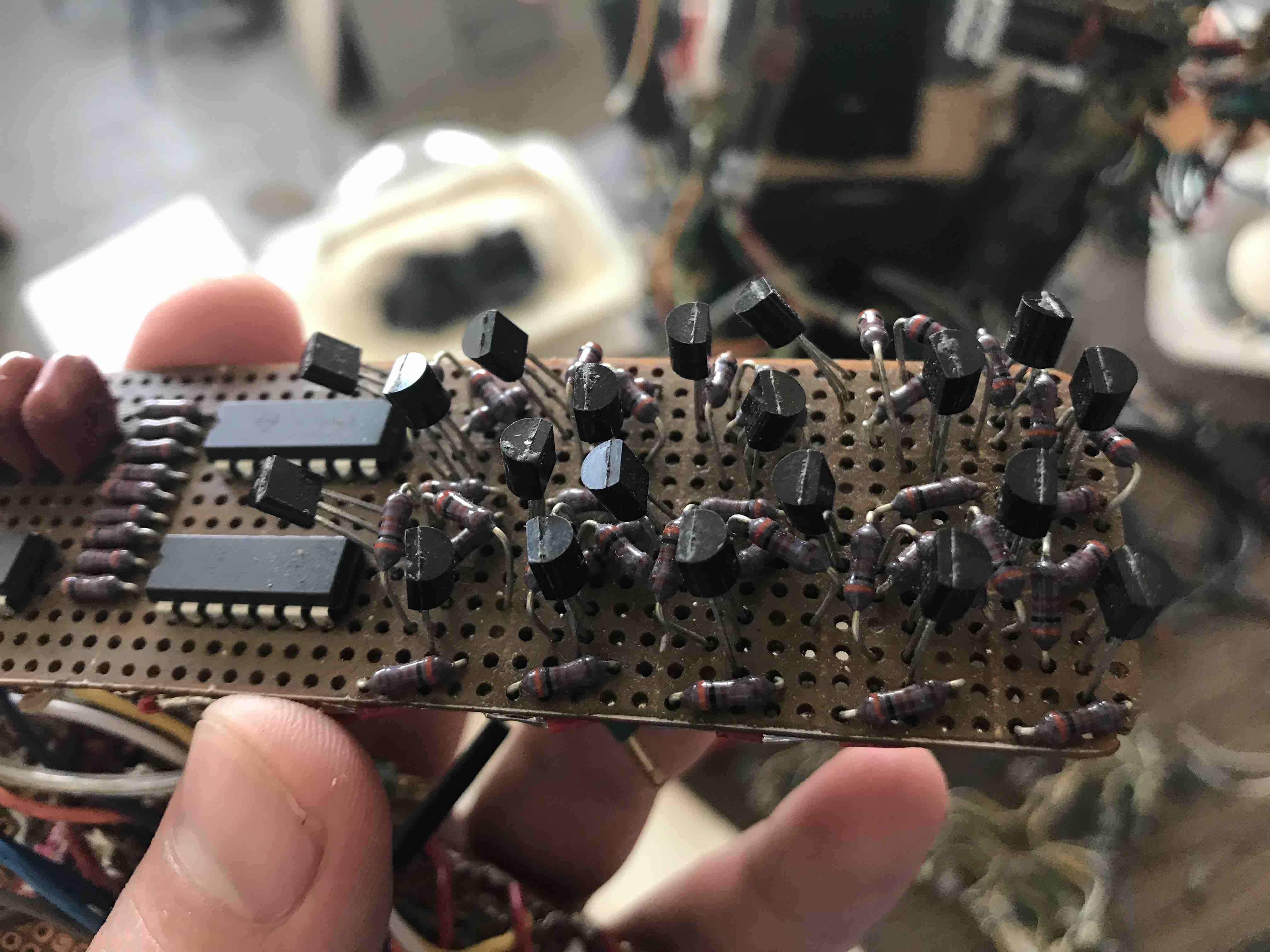
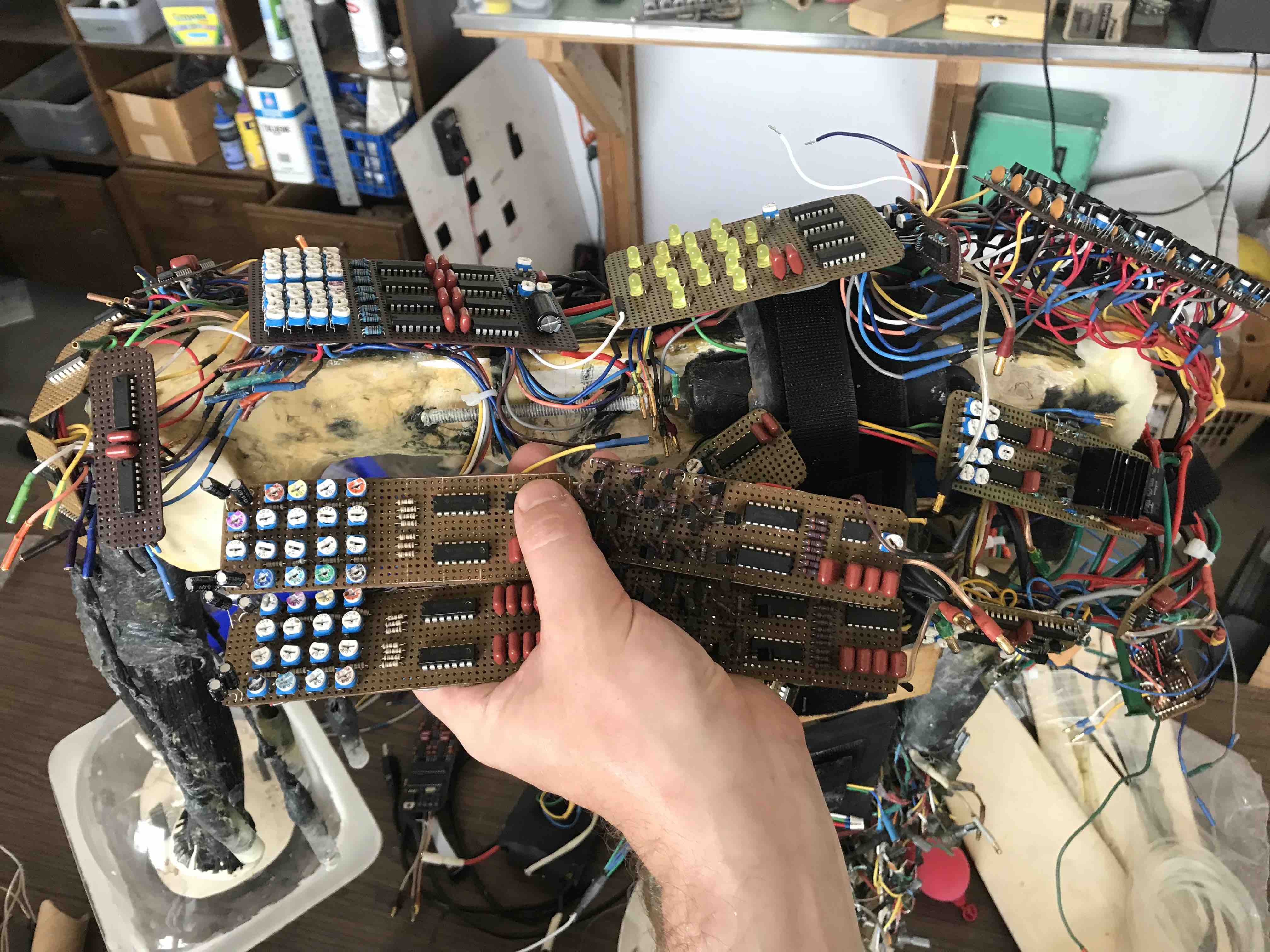
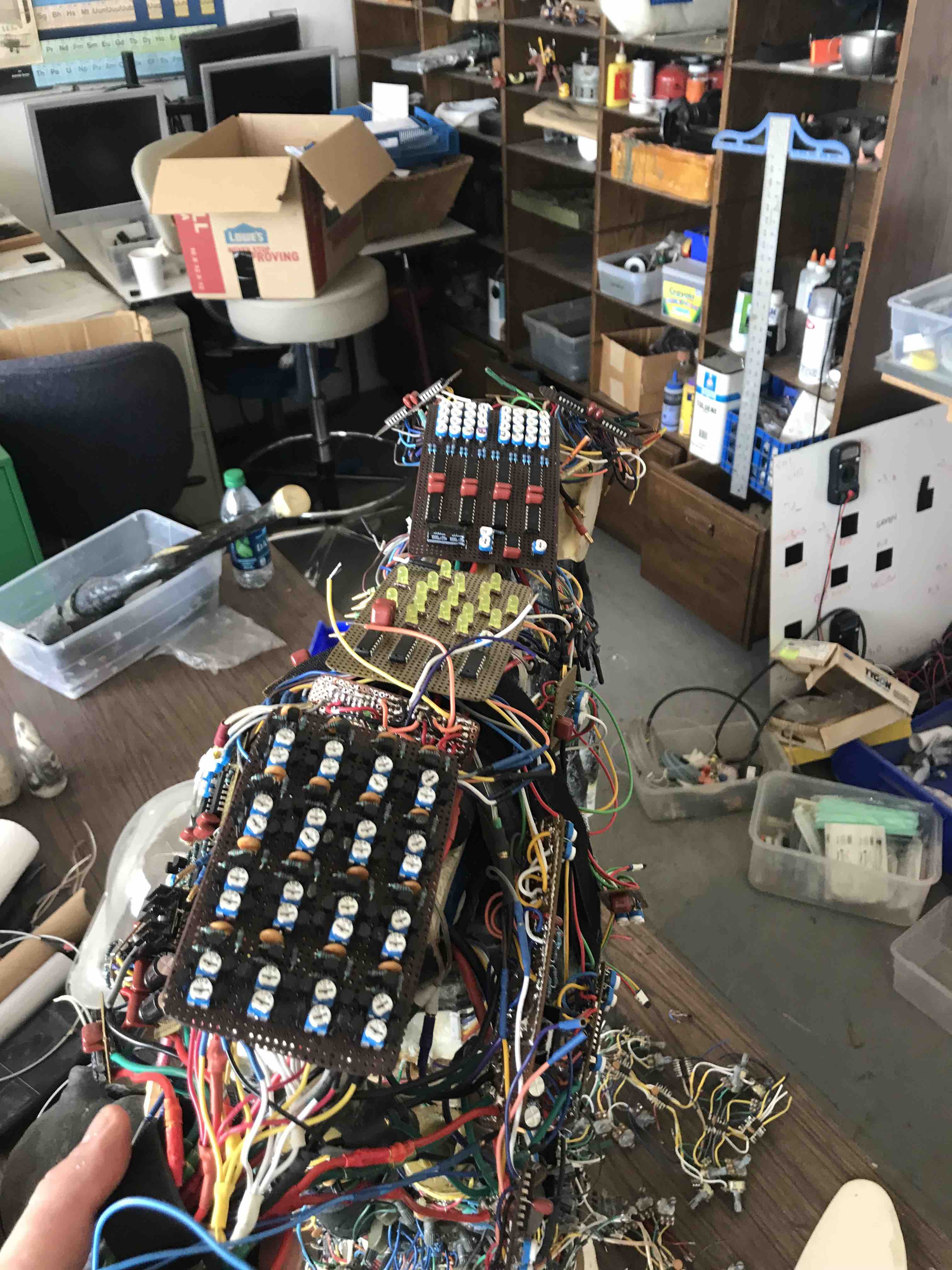
Experiment making a robot arm using analog neural networks, DIY linear actuators and EMG as input. The goal was to not use any ready made solutions for the mechanical and electrical system. The control circuit system was based around op-amp networks. I started off free-form soldering circuits for the simplicity and aesthetics of having it distributed across the system, but moved to protoboard because of the durability and stability.
The circuits were not all of the perceptron type, but also included a winner-take-all circuit (inspired by reading Kohonen's Self-Organizing Maps). The winner-take-all circuit was very simple and was used for the position of the joint with hall sensors and magnets.
Undoubtedly the system is flawed, but the exercise was valuable in approaching how to understand the problem and solve it as straightforwardly and with as few components as possible. Ultimately, the benefit of digital systems vastly outweigh their costs in abstraction (i.e., obscuration, yak shaving, etc) and supply chains for solving immediate problems.
Right now, building an analog robot arm is strictly an exercise in building an analog system arm, and not does not have any practical use. However, if the system's behavior could be specified enough, and enough resources and sophistication in analog design (like Carver Mead's Analog VLSI), there is the possibility to make robust, low-power robots that use control systems analogous to natural nervous system.